


-
2019 - 6 - 11 國(guo)内碼(ma)垛機的發(fa)展現(xian)狀
-
2019 - 6 - 11 包裝機(ji)械與經濟發(fa)展密(mi)切相連
-
2019 - 6 - 11 國内(nei)包裝(zhuang)機械(xie)行業發展(zhan)面臨(lin)的挑戰
-
2019 - 6 - 11 現階段包裝機行(hang)業發(fa)展新要(yao)求
碼垛系統
touguy單(dan)柱式碼(ma)垛機

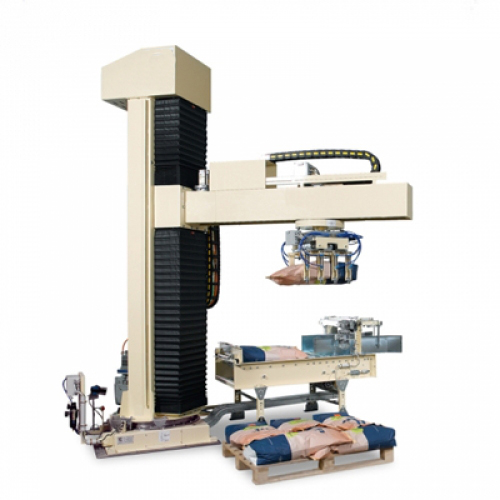
在中(zhong)典公(gong)司生(sheng)産的機器人碼垛機(ji)中,單(dan)柱式機器(qi)人碼垛(duo)機(ji)是最簡單(dan)和占地最(zui)小的機(ji)型(xing)
單柱(zhu)式機器(qi)人(ren)碼垛(duo)機可(ke)以(yi)碼(ma)垛裝有不(bu)穩定、易充(chong)氣、不一(yi)緻物料的成品袋(dai),可在(zai)同一層的頂部(bu)和旁側(ce)局部重疊(die)成品(pin)袋(dai),而且(qie)在成品袋規格(ge)的變(bian)換上(shang)很有彈性(xing)。該(gai)機簡單(dan)到可(ke)以碼(ma)垛直(zhi)接放(fang)在地(di)面上(shang)的托(tuo)盤。
該碼(ma)垛機有一個堅固(gu)的旋轉立柱,上面連接一條可沿柱(zhu)垂直(zhi)上下(xia)移動(dong)的橫向機(ji)械臂。橫向機械(xie)臂上裝(zhuang)有(you)一個(ge)抓取夾(jia)鉗(qian),後者在臂(bi)上來回滑(hua)動并自(zi)己的豎(shu)軸旋轉。
該機從(cong)出袋輥(gun)道(dao)上一(yi)次抓(zhua)取一個成(cheng)品袋,放(fang)在(zai)碼垛(duo)方案(an)指(zhi)定(ding)的位(wei)置。
橫(heng)向臂(bi)下降到适當(dang)的(de)高度(du),使抓(zhua)鉗能從出(chu)袋(dai)輥道上抓取(qu)成品袋,然(ran)後(hou)上(shang)升,使(shi)立柱(zhu)能自(zi)由旋轉(zhuan)。
夾(jia)鉗沿(yan)臂滑(hua)行并(bing)沿軸(zhou)自轉,将成(cheng)品袋(dai)置于(yu)碼垛(duo)方案指定的位(wei)置。橫向臂在适當高度定位,而(er)夾鉗(qian)則松(song)開,将成品(pin)袋放(fang)正在(zai)成型(xing)的托(tuo)盤上。
然後(hou),碼垛機回到起始位(wei)置,準備進(jin)入新(xin)的工作周(zhou)期。
單(dan)柱式機(ji)器(qi)人碼垛機(ji)的構(gou)造結構使該機(ji)擁有(you)以下特點:
能抓(zhua)取(qu)來(lai)自不(bu)同灌裝線的成(cheng)品袋(dai),在一個或(huo)數個碼垛點碼垛。
可(ke)以碼垛直(zhi)接放在地(di)面上(shang)的托(tuo)盤。
體積非(fei)常有(you)限(xian),能(neng)安裝(zhuang)在不能安(an)裝其(qi)他類型碼垛機(ji)的生産環境中(zhong)。
該機擁有(you)plc控制(zhi)的管理(li)模式,通(tong)過适(shi)當(dang)的程序(xu)可以(yi)讓機器執(zhi)行任(ren)何碼(ma)垛方案。産品規格或(huo)碼垛方案(an)的更(geng)換能在幾秒鍾内自(zi)動(dong)完(wan)成。
| 技(ji)術(shu)參數(shu) | |
| 最大速(su)度 | 500 袋/小時,視每層的袋數而定(ding) |
| 成品(pin)袋重(zhong)量 | 可達50 kg |
| 托(tuo)盤最小尺(chi)寸(cun) | 800 x 1200 mm |
| 托盤最大尺(chi)寸 | 1100 x 1500 mm |
| 滿托(tuo)盤最大(da)高度(du) | 1800 mm, 包括(kuo)托盤高度(du) |
| 成型托盤(pan)最大(da)重量(liang) | 2000 kg |
| 管理模(mo)式 | plc |
| 電源 | 220/380 v - 50 hz |
選項(xiang)
成型托盤排出輥道(dao)
空托盤自(zi)動倉庫
放(fang)間隔(ge)膜的(de)裝(zhuang)置(zhi)
請注意:表(biao)格内的數(shu)據僅供參考,真(zhen)實參(can)數要(yao)以每台設(she)備(bei)的(de)特性(xing)爲準(zhun)。
單(dan)柱(zhu)式機器人碼(ma)垛(duo)機配(pei)有安全保護裝置。
- 下一(yi)個:jdl低位碼垛(duo)機
 中典客(ke)服
中典客(ke)服